동영상과 같은 연속적인 이미지에 대해서 feature를 추출하고 tracking 하는 것에는 아래와 같은 어려움이 있다.
몇몇 point는 시간이 지나면서 변화한다. (회전, 그림자 등)
Drift (small errors can accumulate as appearance model is updated)
Point가 나타나거나 사라질 수 있다.
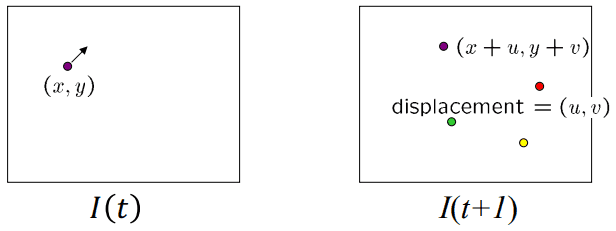
feature moving
다음 시퀀스에서 feature의 이동을 계산하기 위해서 우리는 아래와 같은 가정을 한다.
Brightness constancy - 동일한 faeture는 동일하거나 비슷한 색을 가진다.
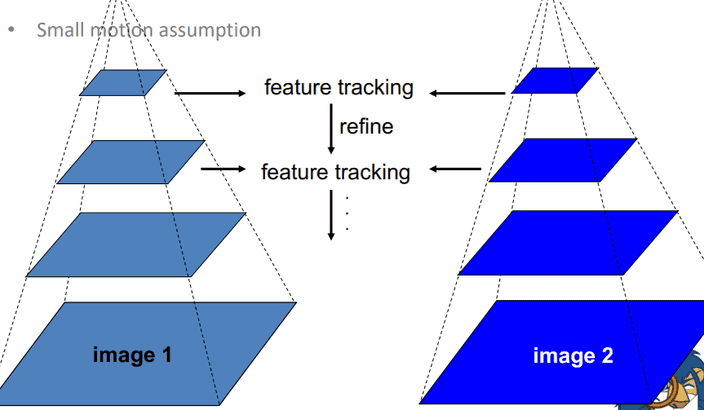
Small motion - point가 많이 움직이지 않는다.
Spatial coherence - point가 그 주변 point들과 비슷하게 움직인다.
Brightness constancy + Small motion
Brightness constancy와 Small motion 특징에 의해 다음 시퀀스에서도 아주 조금 움직이고 동일한 밝기를 가진다고 하면 아래와 같이 표현할 수 있다.
I(x,y,t)=I(x+u,y+v,t+1)
위 식을 N=1인 Taylor Series를 적용하면
I(x+u,y+v,t+1)≈I(x,y,t)+Ixu+Iyv+It
Ixu+Iyv+It=0
으로 근사할 수 있다.
이 때 [u,v]는 motion vector, [Ix,Iy]는 gradient vector, It=I(x,y,t+1)−I(x,y,t)이다.
Lucas-Kanade Method
위 식만을 가지고는 motion vector를 구할 수 없다.
하지만 Spatial coherence 특징을 생각하면 주변의 point들 역시 동일한 움직임을 했다고 생각해보자.
feature point 주변 5x5 window를 구성하고 내부 점들은 같은 움직임을 보인다고 하면 아래와 같이 표현할 수 있다.
ATA should not be too small due to noise (ATA의 eigenvalue λmin이 너무 작으면 안됨)
ATA should be well-conditioned (λmax/λmin 가 너무 크면 안됨 -> 계산 오차가 커질 수 있다고 함)
위 방법은 window size에 의해 영향을 받는다.
너무 작으면 noise에 민감해진다.
또한 window보다 큰 움직임은 계산하지 못한다.
너무 크면 배경과 물체가 다르게 움직이는 등 상황에 따라 오차가 발생한다.
또한 계산 비용이 증가한다.
pyramid tracking
현실적으로 큰 Object에 대해서 tracking을 시도하는 경우가 많다.
하지만 위 방법은 작은 window 사이즈로 small motion을 가정하기 때문에 그림처럼 축소한 후 작은 사이즈부터 tracking을 하는 것으로 진행할 수 있다.
Optical flow
Brightness 패턴의 움직임을 추정하는 것이다.
이는 Object의 모션 움직임 뿐 아니라 카메라 이동등에 따른 이미지 Translation과 같은 것도 추정한다.
Optical flow는 아래 그림처럼 움직임에 따라 색으로 표현한다.
optical flow color
Optical flow는 모든 포인트를 feature로 Lucas-Kanade equation을 적용한다.
큰 모션을 다루기 위해서는 coarse-to-fine 로 접근한다. (coarse-to-file은 한가지 작업을 더 작은 부분으로 나누어 각 부분을 자세하게 살펴보는 것)
그러나 모든 픽셀으로 연산을 해야 하기에 많은 연산량이 필요하다.
그래서 GPU와 같은 병렬 연산이 필요하다.
또 flat이나 edge region의 경우는 추정 불가능하다. (Lucas-Kanade 역행렬이 존재 x)
부가적인 smooth regularization이 필요하다.
요즘에는 FlowNet과 같은 deep learning으로 하고 있기도 하다.
응용
Estimating 3D structure
Segmenting objects based on motion cues (motion segmentation)
Learning and tracking dynamical models
Recognizing events and activities
Improving video quality (motion stabilization) - 카메라 흔들림 같은거 예측